Can Bot
Questions
1. State the assignment (problem/project) in your own words.
The assignment is to create a robot a wide as possible making the robot collect all the bottles/cans, placing them on the perimeter of the circle. You only have 2 minutes to complete the task of putting three of the bottle outside of the circle.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
You need to know that you must use a light sensor in order to complete the task. The reason why is because when the robot puts the bottle on the outside of the circle the robot must stop at the black line and turn looking for the next bottle. The research we did was to see if the plow was to low enough because if the bottle fell it would just slide right under our plow, making us lose time. To fix the problem of the plow being too high I add a couple of legos underneath the plow making it a little lower to the ground not allowing bottle to sweep under the plow.
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
First, we designed the back wheel system. Next, we built a plow that was approximately 10 cm wide. The wider the better because then it could get more than 1 bottle at a time. We mounted the plow in the very front of the bot. Then, we installed the light sensor on the plow and plugged the light sensor into port 3 of the robot. Finally, we plugged the USB port in the robot and programmed the bot to do the following: move forward making it stop before the black line, then to turn around at the black line searching for the next bottle.
4. Describe the final output / product in detail: (what are we looking at?) You are looking at a robot that is meant to be designed to look like a plow. A wheel system is placed in the front of the plow making the robot turn to look for the next bottle to remove from the circle. The light sensor is placed in the very front making the bot detect the black line and turn around.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor etc .How did you use this feedback to correct issues with your project?
"The wider the better." We took this advice from the teacher and put it into our design. As you can see in the pictures below, we added a little more width in construction of the plow-like design.
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc?
I have learned that Constructopedia is a very instructive and useful website that will help my group with designing robots throughout the year. We received a lot of help regarding our back when system and the outcome was successful.
7. If you were to do the project again, what would you do differently and why? Provide reasons and examples.
If I were to do this project again, I would be a little more involved in the programming. The reason why is because I was so concentrated on the construction of the robot that I did only a little of the programming. So, I would like to be a little more involved on that aspect.
The assignment is to create a robot a wide as possible making the robot collect all the bottles/cans, placing them on the perimeter of the circle. You only have 2 minutes to complete the task of putting three of the bottle outside of the circle.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
You need to know that you must use a light sensor in order to complete the task. The reason why is because when the robot puts the bottle on the outside of the circle the robot must stop at the black line and turn looking for the next bottle. The research we did was to see if the plow was to low enough because if the bottle fell it would just slide right under our plow, making us lose time. To fix the problem of the plow being too high I add a couple of legos underneath the plow making it a little lower to the ground not allowing bottle to sweep under the plow.
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
First, we designed the back wheel system. Next, we built a plow that was approximately 10 cm wide. The wider the better because then it could get more than 1 bottle at a time. We mounted the plow in the very front of the bot. Then, we installed the light sensor on the plow and plugged the light sensor into port 3 of the robot. Finally, we plugged the USB port in the robot and programmed the bot to do the following: move forward making it stop before the black line, then to turn around at the black line searching for the next bottle.
4. Describe the final output / product in detail: (what are we looking at?) You are looking at a robot that is meant to be designed to look like a plow. A wheel system is placed in the front of the plow making the robot turn to look for the next bottle to remove from the circle. The light sensor is placed in the very front making the bot detect the black line and turn around.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor etc .How did you use this feedback to correct issues with your project?
"The wider the better." We took this advice from the teacher and put it into our design. As you can see in the pictures below, we added a little more width in construction of the plow-like design.
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc?
I have learned that Constructopedia is a very instructive and useful website that will help my group with designing robots throughout the year. We received a lot of help regarding our back when system and the outcome was successful.
7. If you were to do the project again, what would you do differently and why? Provide reasons and examples.
If I were to do this project again, I would be a little more involved in the programming. The reason why is because I was so concentrated on the construction of the robot that I did only a little of the programming. So, I would like to be a little more involved on that aspect.
Final Product

The wings act as the plow of the bot. The plow makes the bot collect the bottles and transfer the bottles to the perimeter of the white circle. The wider the wings the better off you are. The reason why is because you could scoop up 2 bottles at a time instead of just 1 making more time to get the other. The structure of the can-bot was successful and removed the bottles from the circle.

This wheel system that is placed in the front of the can-bot allows the bot to turn in different. Instead of the wheels being stiff and not being able to turn my group decided to change the construction and make the wheels turn giving a little more support on the turning of the robot to search for the bottles.

This is the robots rear wheel system. We got this construction from the website Constructopedia. We chose this design because it looked fairly simple and it also gave the robot height. Having the perfect height is vital because the water bottle could tip over and the robot will fail to complete the task.
Old Program
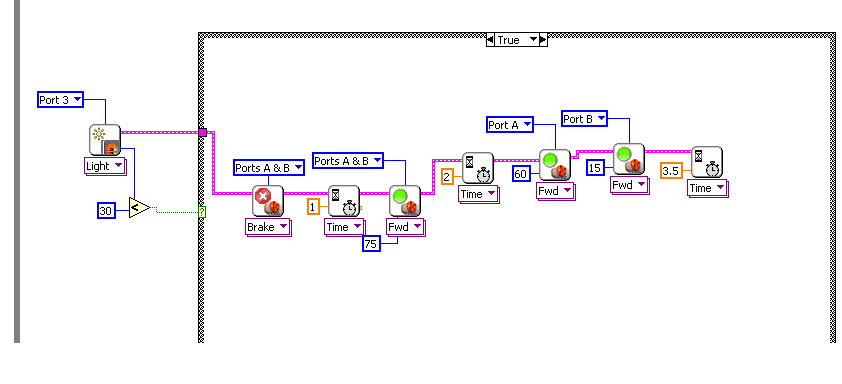
New Program

We changed the program because the old one was not programming the robot to turn. To fix that problem we added the turning with two wheels. Turning in different directions with different speeds making the bot turn and look for the next bottle to knock out of the circle. In the false program it programs the robot to accelerate forward to the black line and then sets it in reverse to travel to the black dot in the center of the circle.
