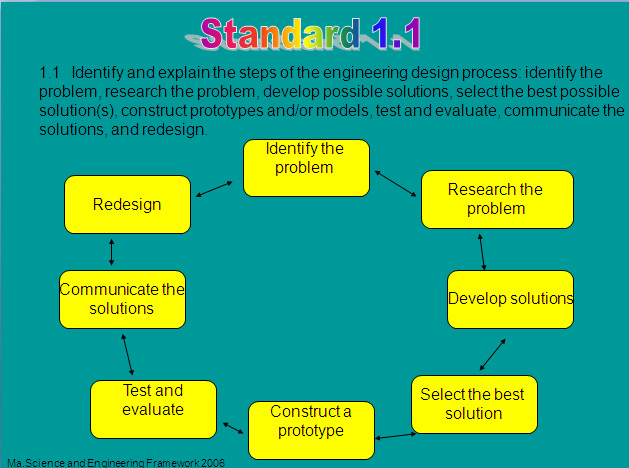
ENGINEERING DESIGN PROCESS
LINE FOLLOW PROGRAM
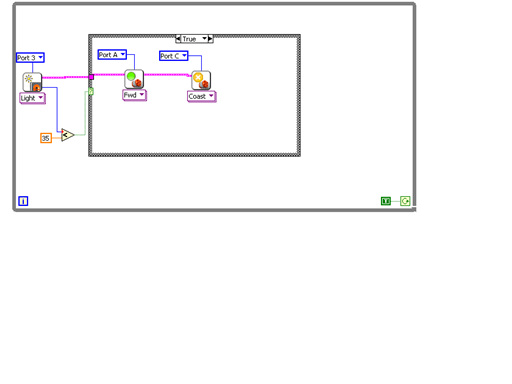
Table Bot Program


Cockroach


Thunderstorm
Questions
1. ) Two motors move forward for 2 seconds and comes to a complete stop. Next, one motor goes one way while the other motor goes the opposite., making the robot turn. Then, the robot is to go forward for one second.
2. ) Diameter * pi= circumference. One rotation is 360 degrees
720 degrees is 2 rotations
Distance=Circumference * number of rotations
2 inches * 3.14=6.28 inches
6.28 inches * 2= 12.56 in
3. )The light sensor is connected to Port 3. If the light percentage is lower than 55, then the motor connected to port A will turn. In the false side of the program, the motor connected to Port A will turn in reverse for one second.
4. )Whenever the touch sensor is pressed, 1,000 Hertz is added to the duration of the tone, causing sound.
2. ) Diameter * pi= circumference. One rotation is 360 degrees
720 degrees is 2 rotations
Distance=Circumference * number of rotations
2 inches * 3.14=6.28 inches
6.28 inches * 2= 12.56 in
3. )The light sensor is connected to Port 3. If the light percentage is lower than 55, then the motor connected to port A will turn. In the false side of the program, the motor connected to Port A will turn in reverse for one second.
4. )Whenever the touch sensor is pressed, 1,000 Hertz is added to the duration of the tone, causing sound.
Final Program
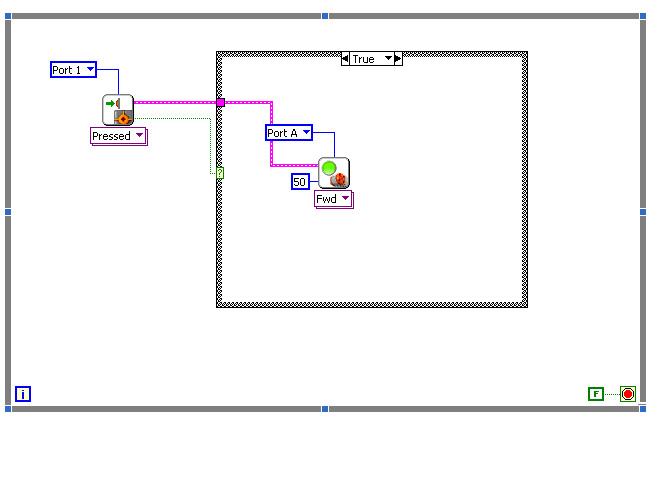
In this program the touch sensor is connected to port 1. The motor is connected to port A. When the touch sensor is pushed down and kept down the motor will be half speed.
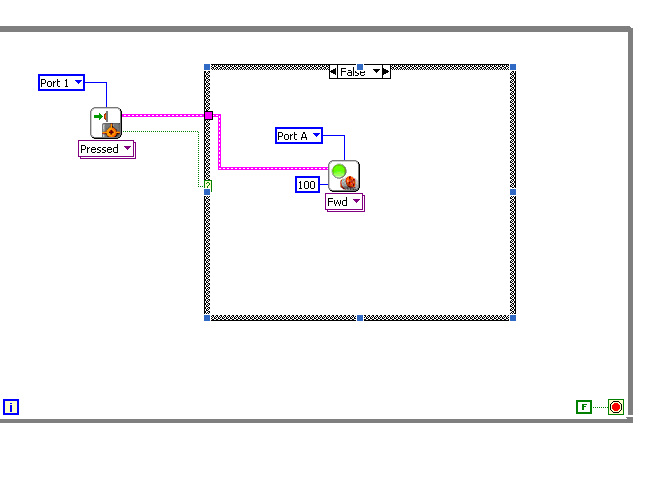
In this False program, when the touch sensor is not pressed the motor will be at full speed.
