Unlock
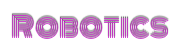
First Prototype
This is our first design. We did it simple, with a tire in the front that would be used to turn the lock. We built it tall due to the position of the lock. We didn't use tires on the main motors because it would have given the robot too much height in which will make the robot unable to reach the lock. Testing the design we noticed it was unstable because it was a tall designed robot that weighed little. Also, i realized that when the tire turned the robot was lifted from the ground. We needed to make the robot smaller and heavier to get rid of the problems.
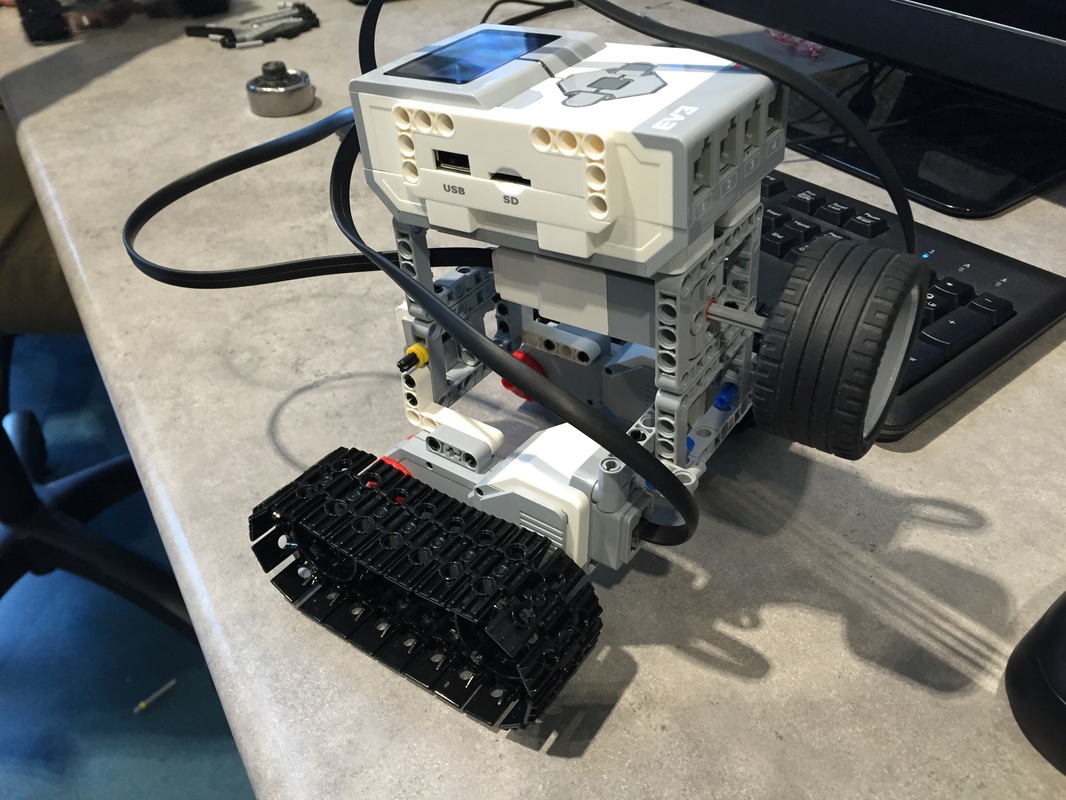
Second Prototype
The prototype above we changed the robot completely. We lowered the robot to make it more stable. We added legos around the tire because after testing it out we wanted to create friction so the tire moves slowly. We realized that the when the tire turned left it was fine but, when it turned to the right the robot was being lifted. We were having the same problems as before. We added weight by placing two of the metal balls that weighed a good amount on top of the tire. Unfortunately, it didn't work with the additional weight. The robot was unstable and unable to turn the lock to the right.
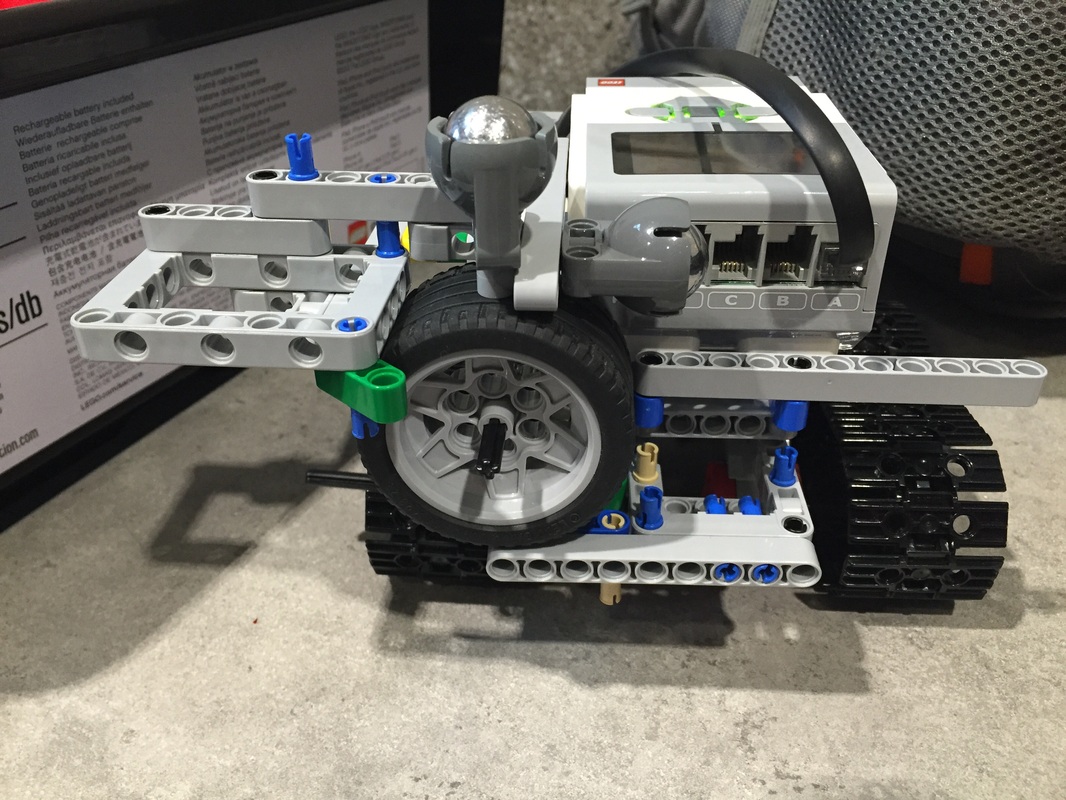
Third Prototype
This design is similar to our second prototype except for a couple of adjustments. We removed the two metal balls placed at the top of the tire because the robot still needed more weight. My partner and I were stuck on redesigning this robot for a couple of days. We added a lego piece to the left of the tire to keep the tire stable and make it so that it's not wobbling. I realized that the robots design is fine, it's the design around the tire. The tire needs to be stable because when it's not that's what makes the bot turn to the left but not the right. The shakiness makes the lock hard to turn. To solve the problem we boxed the tire in for support.
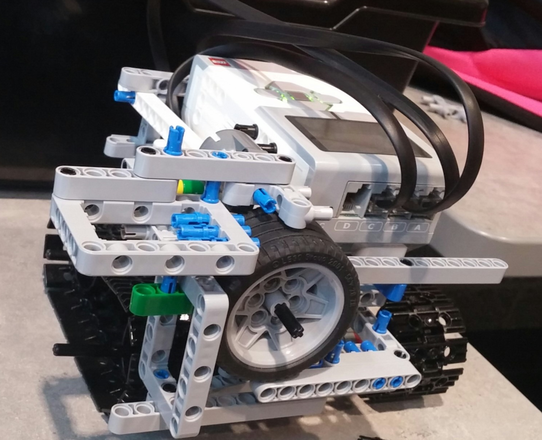
Fourth Prototype
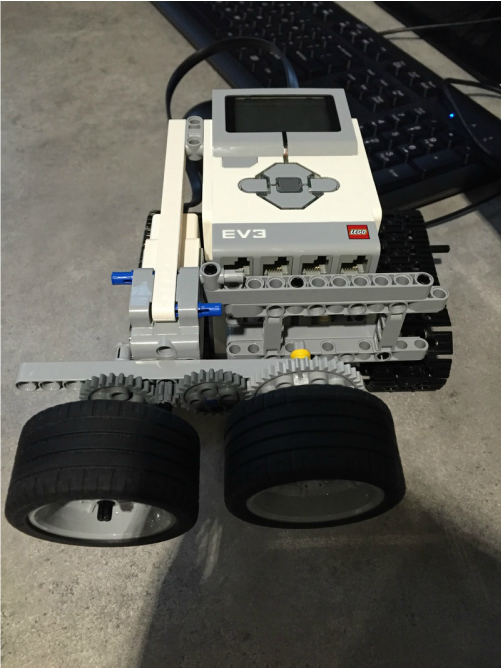
This is our fourth prototype and we have taken a new approach. One of my classmates gave me this idea and I thought I could try it out. The robot is the same height and size. We used gears to create the space between the tires in which the dial will be placed. We thought that since one tire isn't working then lets try two. Because we were having problems with turning to the right we thought having a tire on the other side will keep the tires in place and the robot more stable. When the tire turned to the right the robot went in an upward direction. I think the problem was the space between the two tires were to small. Again, we were unsuccessful.
Final Product
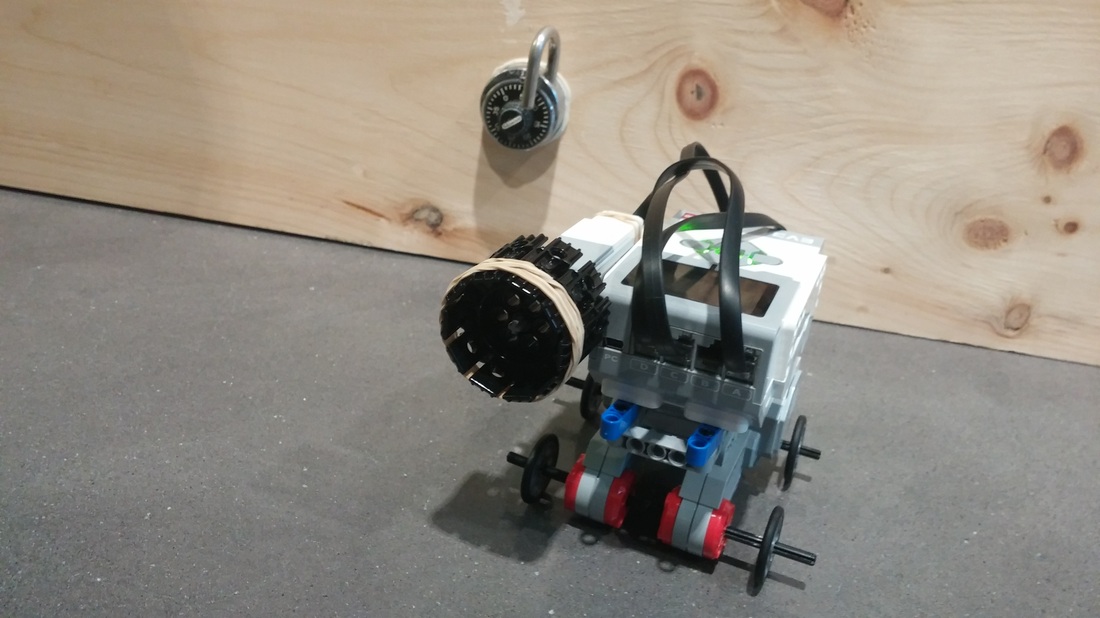
This is our final product. We wrapped rubber bands for more grip to the dial instead of putting the robot face onto the lock, the robot turned the lock from the side. It was successful because the robot was able to unlock the lock.
